CYBATHLON ready.
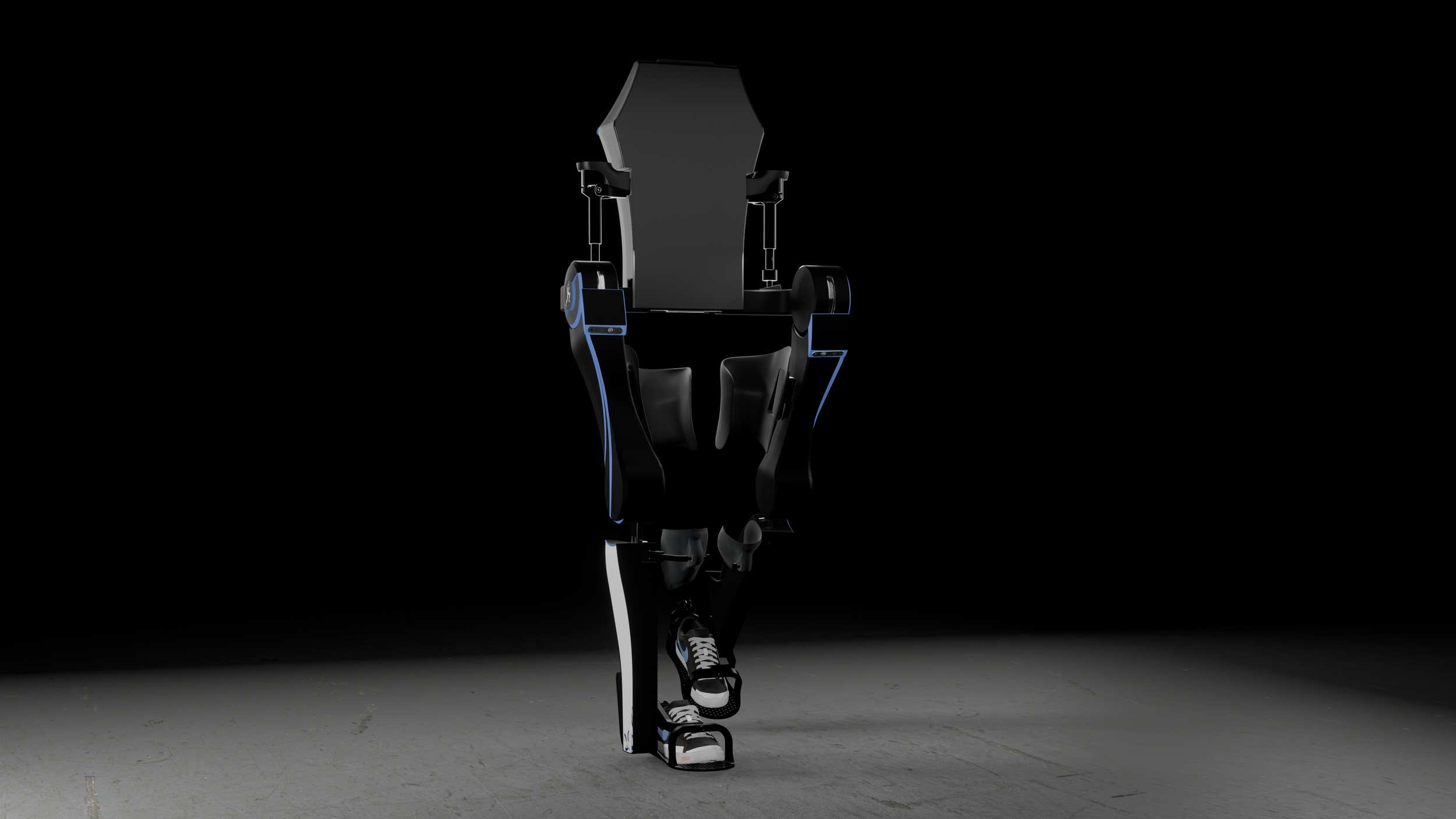
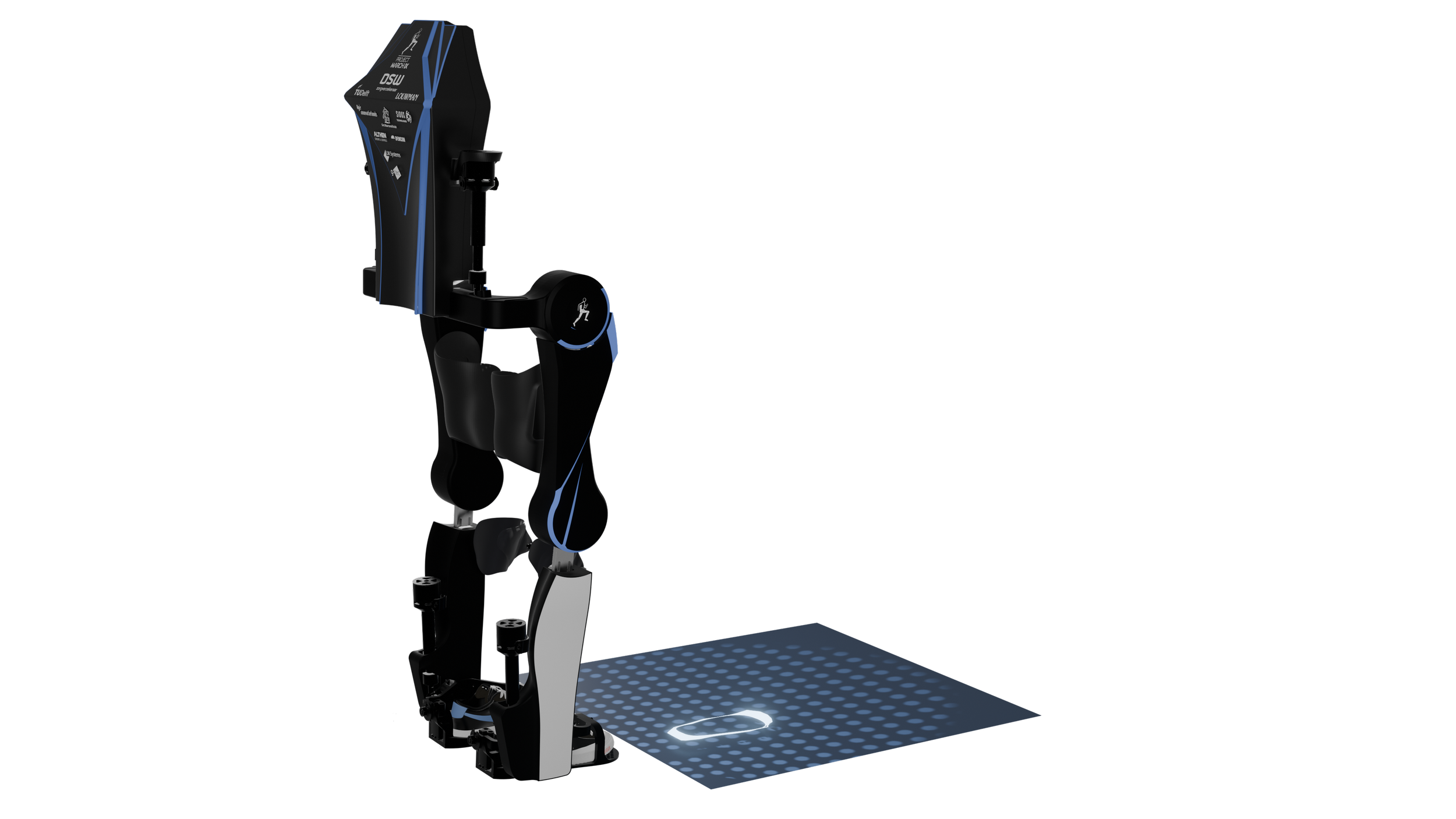
The MARCH IX exoskeleton is being built as we speak.
The MARCH IX is the 9th prototype in the Project MARCH series of exoskeletons. On the 7th of March, 2024, we presented the design of the exoskeleton we will take to the CYBATHLON 2024 in Zürich. Our exoskeleton has to be fast, dynamic and reliable for us to take on all 10 obstacles the competition brings, in 10 minutes.
Join us at our Exoskeleton Reveal on the 22nd of July to see the design in action, in real life.
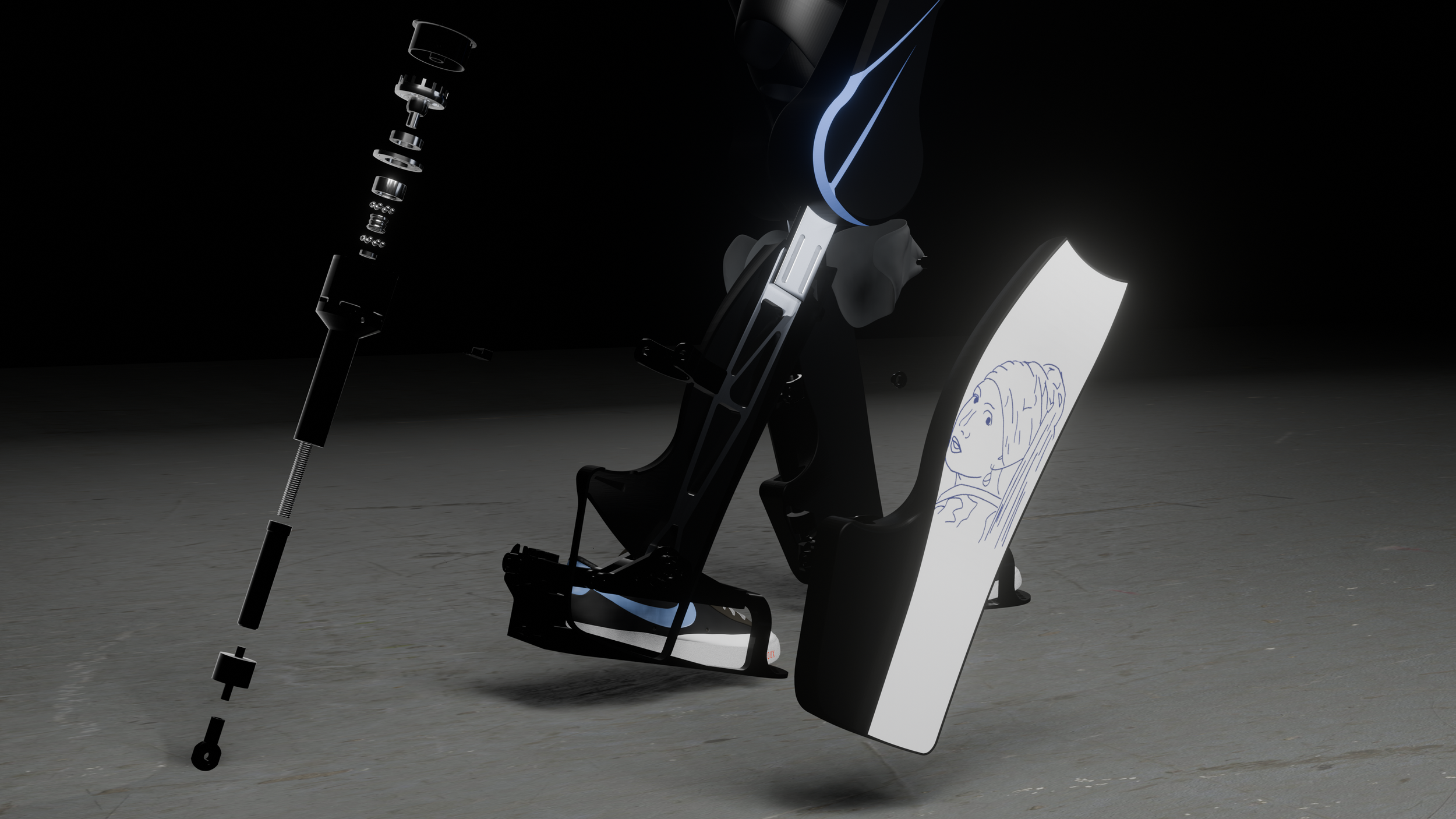
Ankle inversion/eversion joint
Completely new this year: our Ankle Inversion/Eversion joint. The AIE allows our pilot’s foot to swivel from side to side passively, bringing benefits to balance and reliability.
The AIE is made up of a ball rolling along a profile, supported by springs. With these springs, the AIE is our first joint that is meant to provide passive force! The ball within the joint passively moves along its profile which we developed to help stand balanced on one leg. When making a step, this helps our pilot remain upright while the other leg is swinging. This helps him reliably maintain balance, and supports him on an uneven surface.
Balance
The MARCH IX exoskeleton will be able to walk balanced, free from crutches or other support. It does this via a combination of the support of our AIE, as well as constant state estimation and small corrections in position.
Balanced walking has been a goal since Project MARCH VIII. Walking without having to support yourself is an important, or even essential, development for a future in which people with paraplegia can perform mobile daily tasks with minimal to no hindrance, keeping their hands free for anything the person would want to do whilst walking.
Project MARCH x Royal Delft
The CYBATHLON 2024 is an international competition, in which we represent not only the Netherlands, but also our beautiful city of Delft. We are proud of our city, and want to share that pride with all CYBATHLON visitors and audience members.
Therefore, as a special gesture, the cover on the MARCH IX left lower leg will be made in collaboration with Royal Delft, the offical designers and distributors of the classic Delft Blue. This nod to the city where we are based makes our exoskeleton recognizable in a global context.
The specific design of our Delft Blue leg cover will be announced on a later date!
40% Frame weight reduction

For fast and reliable performance, our exoskeleton should provide as little hindrance to our pilot as possible. This includes making it as light as possible, keeping it manouvreable, and easy to correct.
To ensure our frame, the heaviest element of our exoskeleton, will be as light as possible without compromise of strength, our engineers have utilized topology optimization. This algorithm calculates where material can be cut out whilst not losing integrity.
Use of this algorithm has led to a 40% decrease in mass, making our eventual exoskeleton lighter, more dynamic and easier to use.
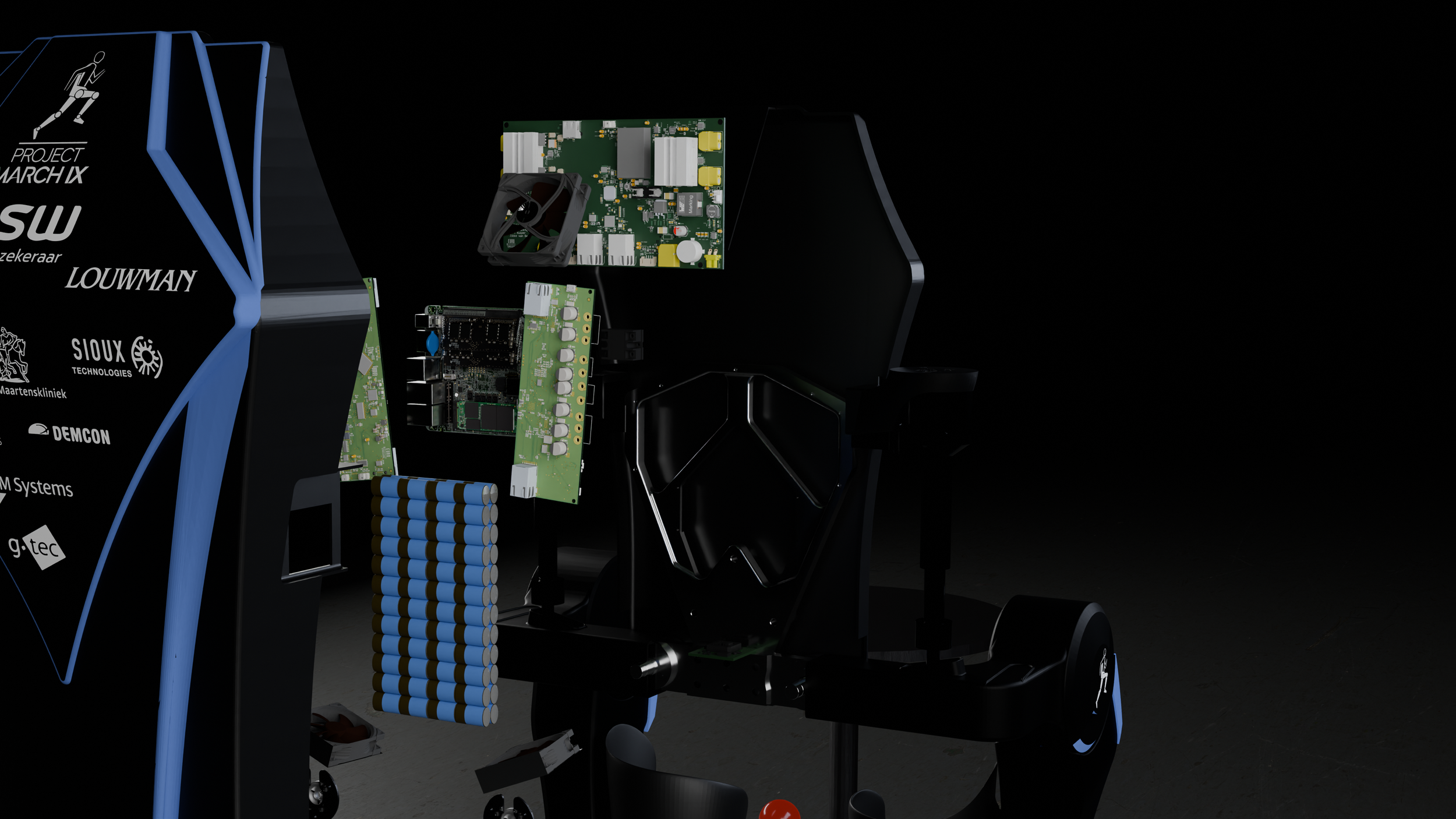
Self-made motor controllers
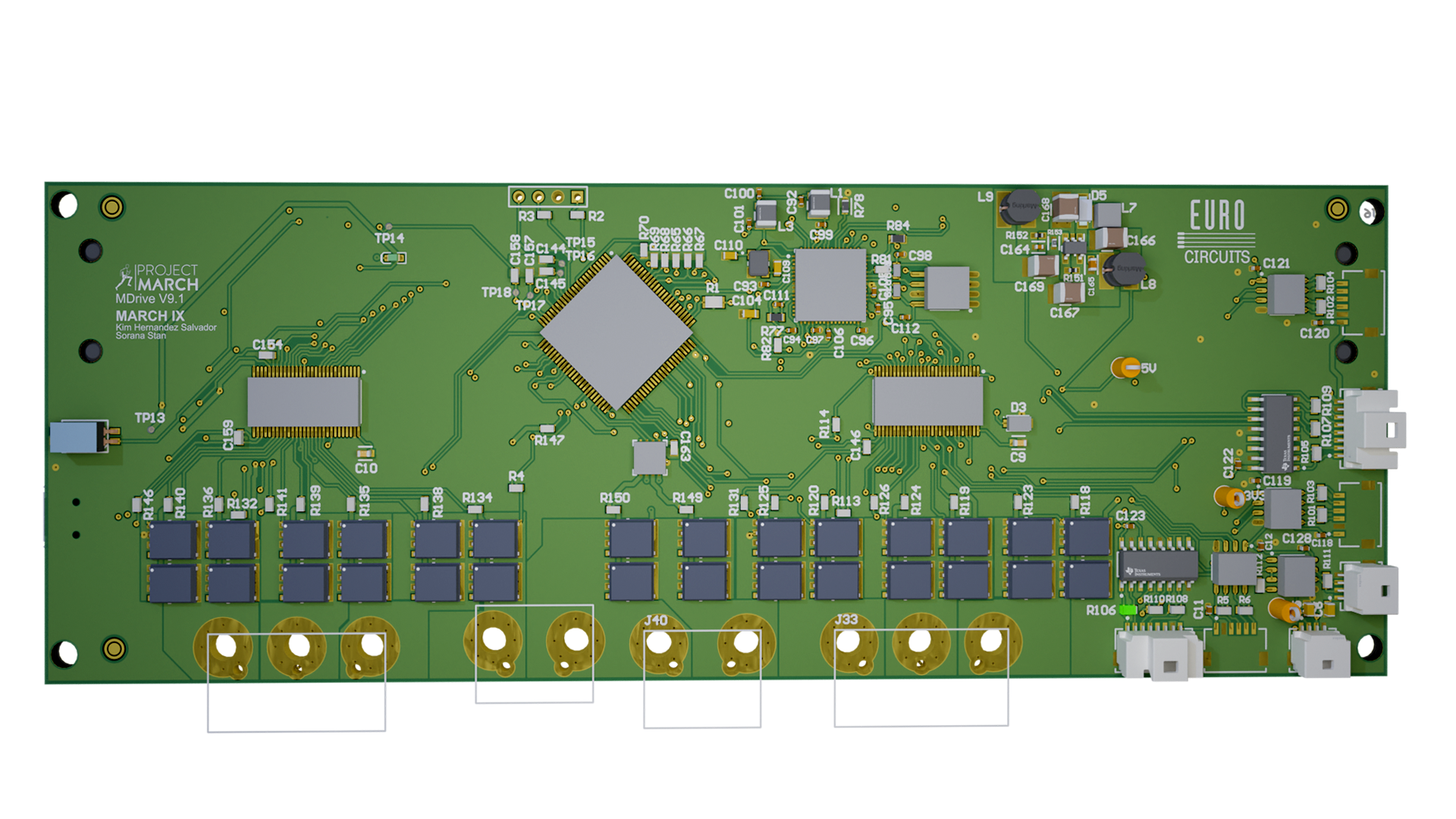
This year, our engineers have produced custom motor controllers. This allows us to minimize a delay we’ve had within previous designs, quickly converting input signals to an output signal which can be sent as is to our joints. The motor controllers have been named the “MDrive”.
Our ninth exoskeleton design features four of these MDrives throughout the exoskeleton. Two sit in the backpack, and one in each leg. Each of these MDrives is essential in providing fast and reliable driving of our joints, with minimal delay.
Input device

Our Input Device (IPD) is the pilot’s main way of interacting with our exoskeleton. We develop the IPD with the pilot, ensuring that his measurements and preferences are taken into account. This design features an IPD that can fully detach from a crutch to allow for balanced walking, which is one of the CYBATHLON 2024 obstacles we will have to overcome in October.
The IPD has a rocker switch which allows the pilot to dynamically slow down or speed up his pace, as well as a joystick which he can use to interact with the interface. On the interface, he can see and select the gait (exoskeleton movement pattern) that he wants the exoskeleton to perform, such as the stairgait or sitgait.
As we need the IPD to detach during the freewalk obstacle, the IPD fully works using Bluetooth, meaning a reliable wireless connection. This reliability is essential, as losing connection to the exoskeleton during the CYBATHLON will lead to our pilot not being able to control the exo during the competition.
Linear joint

Our exoskeleton contains four linear joints, 2 per leg. Linear joints actuate a pushing and pulling force, which we use to provide strong torque. From the top down, the first linear is situated in the hip. This allows our exoskeleton to move the pilot’s entire leg from side to side. The second is in the lower leg. This linear joint moves the ankle up and down, allowing the pilot to tip his toes upwards and downwards.
The upper linear is essential for three CYBATHLON obstacles, the train compartment, slope and stepping stones. Each of these requires our exoskeleton to be able to place the pilot’s leg in variable horizontal positions, challenging teams in maintaining balance while doing so.
The lower linear is necessary for keeping a dynamic gait, meaning that it allows our walking pattern to be fast and consistent with a nice flow. It allows the pilot to place his heel first in a step, and step off the ground using his toes.
Rotational joint

The exoskeleton contains 4 rotational joints, 2 in each leg. Rotational joints actuate the angle between two parts, allowing us to rotate frame parts in relation to one another. The first rotational joint is in the hip, and rotates the entire leg forward and backward. The second rotational joint is in the knee, rotating the lower leg in relation to the upper leg. This allows the pilot to bend his knee.
The upper rotational moves the entire leg forward and backward. This provides the main walking motion we are familiar with. Naturally, this movement is essential for our exoskeleton being able to walk, but it will also be needed for CYBATHLON obstacles such as the stepping stones and the stairs.
The lower rotational allows our pilot to bend his knee. This movement is also necessary for regular walking, but sees specific use in many CYBATHLON obstacles. For instance, bending your knees is necessary for sitting and standing up, bending down, and being able to stand on a slope.
Depth cameras

Each leg features a set of sensors which provide our exoskeleton’s software with data it uses to walk dynamically. It does so by scanning several points in front of the exo, creating a so-called point cloud. The point cloud is translated into a 3D environment in which the exoskeleton will plan the next foot placements it will make.
By scanning its environment, the exoskeleton can notice unsafe locations to place a step, and avoid them. By making these choices before actually making the step, our exoskeleton is more reliable and dynamic.
The depth cameras see specific use in CYBATHLON obstacles such as the stepping stones and the stairs, where it’s essential for the exo to be able to know where it can step safely.
State estimator
We want our exoskeleton to be able to accurately know the state of all its joints, as well as its rotation in relation to the ground. This allows the exo to recognize when it’s in danger of falling, or if its joint angles should be corrected.
Our state estimation algorithm gathers all the data from the sensors that are present in the exo. This information allows the algorithm to determine the exact position of the exo and the rotation of its joints. Ultimately, knowing this information makes the exoskeleton more reliable and safe to use.
Brain control

Through electroencephalography (EEG) technology, we read our pilot’s brain waves. Our software recognizes the specific waves that our pilot has when he focusses on walking, and translates it into an input our exoskeleton can use to start walking.
EEG technology is a possible solution for exoskeletons that can one day make people with paraplegia mobile without the need of an input device. When using an EEG, a person does not need to use their hands when piloting an exo, meaning they are free to do all kinds of activities while walking. (A form of) EEG technology is therefore almost certainly present in the exoskeletons of the future.
During the CYBATHLON 2024, we will not make use of an EEG to control our exoskeleten due to reliability issues.
However, due to the importance of EEG technology in the future vision of exoskeletons, our design is made in tandem with further development of our EEG tech, and will be compatible with it so that we can perform tests. We hope to one day have reliable EEG technology as a way of input for our exoskeletons, and will steadily work towards that goal.